设为首页
收藏本站
首页
Portal
工控论坛
BBS
工控文库
自动化技术
智能化技术
微信群/QQ群
产品服务
联系我们
登录
立即注册
工控行业信息
工控自动化技术
工控智能化技术
论坛建设
技术文章
行业资讯
PLC论坛
变频器论坛
SCADA论坛
电工电气论坛
仪器仪表论坛
工控自动化资料下载
AI启蒙论坛
AI工具论坛
智能控制算法与模型论坛
AI数字化与数字孪生论坛
智能能效论坛
智能运维论坛
工控学习网
»
工控论坛
›
工控自动化技术
›
PLC论坛
›
实战经验:几种易于在工程中使用的算法入门 ...
返回列表
发布新帖
查看:
39
|
回复:
0
实战经验:几种易于在工程中使用的算法入门
[复制链接]
gkxxw123
gkxxw123
当前离线
积分
2220
718
主题
0
回帖
2220
积分
版主
积分
2220
发消息
发表于 2026-4-19 11:29
|
查看全部
|
阅读模式
知识是电气领域的常见课题,本文结合真实案例,手把手带你搞懂其中的关键要点。
电工
实际使用,还是
电气
科研入门。对于某个系统过程的控制是不可避免的,特别是人工智能兴起的今天,电气作为工科领域的老大哥,也是与时俱进的,现在我们来了解一下几种简单传统的控制算法及其改进。
PID控制算法:
PID控制算法在工业微机中已经应用的比较广泛,控制结构简单,参数易于调整,一般是根据经验进行在线对参数整定。
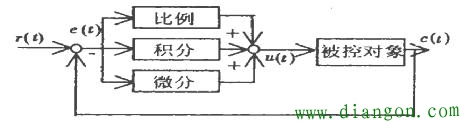
PID控制算法的控制规律:
其中U(t)代表的PID控制的输出,e(t)代表的输入信号,Kp代表的是比例系数,Ti代表的是积分控制,Td代表的是微分控制。
如果将它建立成模型控制系统:
比例环节:即系统的偏差信号e(t)会产生成比例的控制作用来减少偏差。缺点是加大了比列系数会使系统的稳定性变差。
积分环节:积分控制主要是用于消除稳态误差,提高系统的无差度,但是积分常数越大反而积分作用越弱。缺点是它可能会使系统频带变窄。
微分环节:作用是具有预见性,能反应偏差信号的变化率,能提前知道变化趋势。加快系统响应速度,减少超调,减少调节时间。
以上可以进行三种组合控制即:PI,PD和PID三种。
改进的第一种位置式PID控制:
就是将上面提到的PID控制离散,也就是将一个连续的输入变成无数个断点
离散化之后可以对工业情况中某次特殊情况单独进行分析,只对它偏差值进行点控。
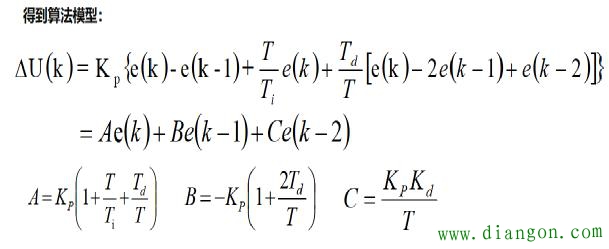
改进的第二种增量式PID算法模型
因为位置式PID控制算法中,每次的输出与控制偏差e过去的整个变化有关,这样的累加效应会使系统产生较大的累计偏差,让整个控制系统出现不良的超调现象。其中A,B,C是为了编程更加方便,优点是只需要计算三次采样周期的偏差值旧的计算出本次周期的控制变量▲U的增量。
以上只是在初次对PID控制算法中的学习心得,希望有助于前沿的前辈们学习掌控,后续也会对其它智能控制算法上的普及,比如遗传算法和粒子群算法,烟花算法等。
热心坛友
折叠
加载中...
请先登录后再评论
工控学习网 www.gkxxw.com
回复
使用道具
举报
返回列表
发布新帖
关于我们
关于我们
联系我们
服务支持
产品服务
微信群
投诉/建议联系
gkket@qq.com
未经授权禁止转载,复制和建立镜像,
如有违反,追究法律责任
添加大狮哥微信
关注公众号
工控学习网
© 2001-2026
Discuz! Team
. Powered by
Discuz!
W1.5
关灯
在本版发帖
攻城大狮哥
攻城大狮哥
返回顶部
快速回复
返回顶部
返回列表


 发表于 2026-4-19 11:29
发表于 2026-4-19 11:29