设为首页
收藏本站
首页
Portal
工控论坛
BBS
工控文库
自动化技术
智能化技术
微信群/QQ群
产品服务
联系我们
登录
立即注册
工控行业信息
工控自动化技术
工控智能化技术
论坛建设
技术文章
行业资讯
PLC论坛
变频器论坛
SCADA论坛
电工电气论坛
仪器仪表论坛
工控自动化资料下载
AI启蒙论坛
AI工具论坛
智能控制算法与模型论坛
AI数字化与数字孪生论坛
智能能效论坛
智能运维论坛
工控学习网
»
工控论坛
›
工控自动化技术
›
PLC论坛
›
经验分享:PID自动控制回路的振荡与应对策略 ...
返回列表
发布新帖
查看:
27
|
回复:
0
经验分享:PID自动控制回路的振荡与应对策略
[复制链接]
gkxxw123
gkxxw123
当前离线
积分
2220
718
主题
0
回帖
2220
积分
版主
积分
2220
发消息
发表于 2026-4-19 11:29
|
查看全部
|
阅读模式
说起自动化,很多人对知识感到头疼。今天就来系统聊聊这个话题,希望能帮到大家。
自动化
控制领域,PID自动控制回路的应用非常广泛。然而,在使用过程中,我们常常会遇到各种振荡问题,如同相位振荡、异相位振荡和非平滑振荡等。这些问题不仅会导致装置的不稳定,还可能影响整个生产过程的安全和效率。本文将分享这三种振荡的特征及相应的应对方法,以供参考。
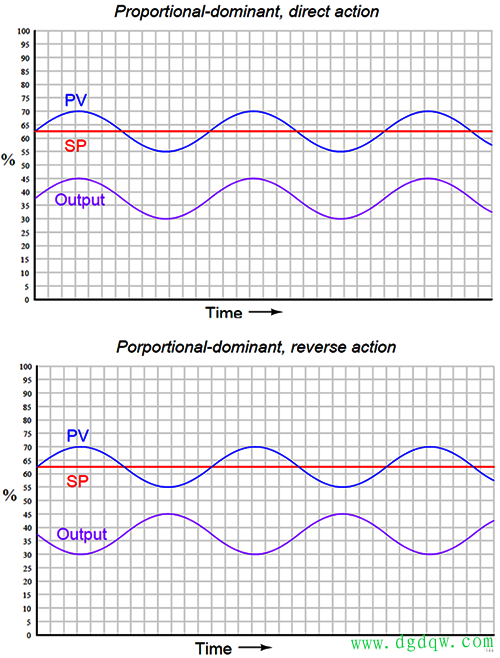
一、同相位振荡
同相位振荡中,过程变量和控制器输出表现出同升同降同拐点的特性,两个曲线相似或对称。这种振荡往往是由于外部干扰或比例作用太强所引起。
应对方法:可以尝试将比例增益降低三分之一,观察振荡是否加剧。如果振荡加剧,则说明问题可能不是PID参数设置不当,而是存在外部扰动。此时,建议恢复参数并寻找振荡源进行整定。如果比例作用太强引起的同相位振荡,将比例增益降低三分之一,往往会使振荡消失。
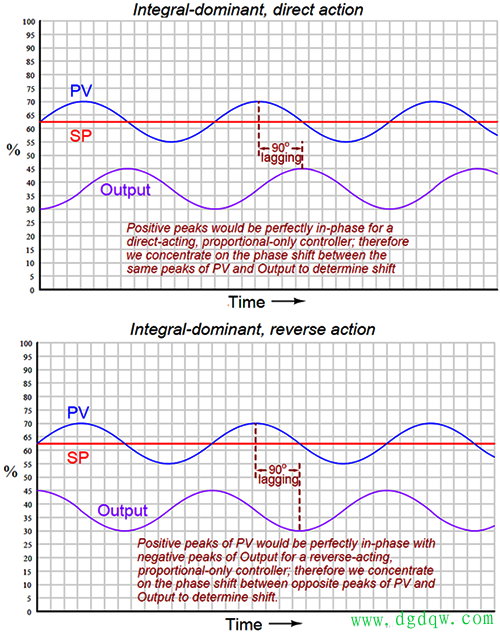
二、异相位振荡
在异相位振荡中,过程变量和PID控制器输出表现为极值对腰部,两个曲线此消彼长。这种振荡肯定是由于积分作用太强所引起。
应对方法:可以尝试将积分时间设置为与振荡周期相匹配的值。对于自衡对象,将比例增益降低三分之一会使异相位振荡消失,但闭环性能可能会略差。然而,对于积分对象,降低比例增益可能会导致更大幅度、更低频率的异相位振荡。
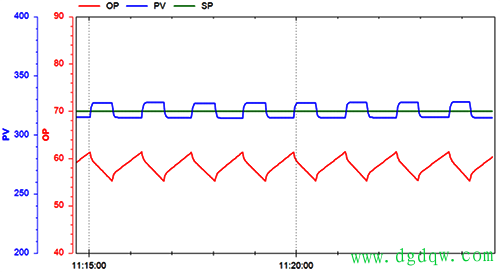
三、非平滑振荡
非平滑振荡中,过程变量和控制器输出表现为过程变量方波、控制器输出锯齿波。这种振荡往往是由于调节阀的非线性造成的。
应对方法:非平滑振荡的解决通常需要调整调节阀,包括润滑、松填料、阀杆校正、调整前后手阀或旁路、调整阀位定位器参数以及更换阀位等。此时,整定PID参数往往是徒劳的,容易让人怀疑整定方法的正确性。
四、总结与建议
在处理PID自动控制回路的振荡问题时,我们应首先考虑降低比例作用,因为它是解决同相位和异相位振荡的首选方法。对于自衡对象,PI控制简单、有效、鲁棒且广泛适用,不追求极致性能的情况下,PI控制是一个很好的选择。对于不追求极致性能的自衡对象,PI控制简单、有效、鲁棒、广泛适用。这也是工业普遍使用PI控制的原因。PI的极致性能和被控对象模型信息相关。如果要进一步超越极致闭环性能,工程上常常改进结构,例如串级前馈甚至改进设备。学术上常常改进PID算法,设备不够算法凑。这类要求实际生产中较少遇到,更多情况是处理不合理参数引起的振荡和抗扰不足。现场大量使用单回路控制也说明自动化提升的空间还很大!无论是单回路的性能、阀位和设定值的自由度利用、还是多变量协调约束优化。PID参数整定工作只是一部分工作,为了进一步提升安全和效率,过程控制更应该研究这些。
在过程控制中精确的模型比较难得到而且普遍存在纯滞后这可能是新算法推陈出新但是过程控制中PID长盛不衰的原因。反馈加持的PID异乎寻常的强大!认识到这一点后整定方法变得就不那么重要了,知道影响闭环性能的边界和了解PID的能力更重要。
热心坛友
折叠
加载中...
请先登录后再评论
工控学习网 www.gkxxw.com
回复
使用道具
举报
返回列表
发布新帖
浏览过的版块
供求信息
关于我们
关于我们
联系我们
服务支持
产品服务
微信群
投诉/建议联系
gkket@qq.com
未经授权禁止转载,复制和建立镜像,
如有违反,追究法律责任
添加大狮哥微信
关注公众号
工控学习网
© 2001-2026
Discuz! Team
. Powered by
Discuz!
W1.5
关灯
在本版发帖
攻城大狮哥
攻城大狮哥
返回顶部
快速回复
返回顶部
返回列表


 发表于 2026-4-19 11:29
发表于 2026-4-19 11:29